Урок№ 41Тема Призначення та будова жатки
прочитати-законспектувати за посиланням https://studopedia.su/14_79368_budova-i-robochiy-protses-zhatok.html
Жатка валкова начіпна ЖВН-6Бпризначена для скошування та укладання у валки зернових і зернобобових культур. Вона фронтальна, агрегатують її із зернозбиральними комбайнами СК-5М і "Єнісей-1200".
Основними складальними одиницями жатки є мотовило 4 (рис. 6.6), різальний апарат 7, транспортер 8, корпус (платформа) жатки, начіпний пристрій, механізм зрівноважування жатки, вітровий щит 2, боковини жатки з подільниками 6, башмаки, механізм привода робочих органів та гідросистема.
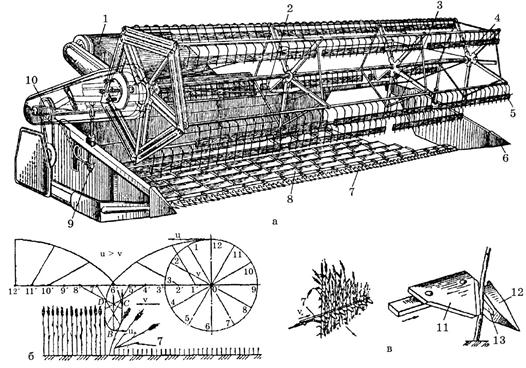
Рис. 6.6. Валкова жатка ЖВН-6Б:
а - загальний вигляд; б — траєкторія руху планки мотовила; в — схема робочого процесу різального апарата; 1 - похила камера; 2 — щит вітровий; 3 — напрямний щиток; 4 - мотовило; 5 - граблина; 6 - подільник; 7 — різальний апарат; 8 — транспортер; 9 - гідроциліндр; 10 - варіатор; 11 — сегмент; 12 — палець; 13 — протирізальна пластина
Мотовило 4 п'ятипланчасте універсальне ексцентрикового типу. Воно складається з трубчастого вала, на якому закріплені диски. До дисків приєднані промені. На кінцях променів встановлені граблини, кожна з яких складається з трубчастої осі та пружинних зігнутих пальців. Під час обертання мотовила пальці захоплюють стебла і підводять їх до різального апарата (рис. 6.6,6). При збиранні прямостоячих хлібів до пальців граблин кріплять дерев'яні планки або стрічки з прогумованого паса. Підшипники вала мотовила встановлені на повзуни, які можна переміщувати вздовж підтримуючих планок. Мотовило приводиться в рух клинопасовим гідрофікованим варіатором.
Різальний апарат сегментно-пальцьового типу складається із пальцьового бруса, рухомого ножа і кривошипно-шатунного механізму. Апарат укомплектований стальними одинарними, подвійними пальцями з насіченими вкладишами, або двосторонніми з "тандем-зрізом".
Привід ножа здійснюється кривошипно-шатунним механізмом і проміжним колінчастим коромислом, на якому закріплені болти з кульовими головками. Транспортер жатки має шість ступінчастих пасово-планчас-тих стрічок шириною 125 мм. Стрічки встановлені на ведучих і ведених валах. До транспортерних стрічок приклепані планки.
Платформа складається з головної балки, задньої трубчастої балки і двох боковий з носками, що виконують функції подільників.
На головній балці приварені кронштейни кріплення підвісок блоків пружин зрівноваження, а на задній - кронштейни кульового шарніра і бокові упори, що обмежують поворот жатки відносно похилої камери в горизонтальній площині. Таке з'єднання забезпечує переміщення жатки відносно похилого корпусу в поздовжньому і поперечному напрямках.
Гідравлічна система жатки призначена для зміни частоти обертання мотовила і переміщення його по висоті. Підіймання і опускання жатки здійснюється двома гідроциліндрами комбайна.
Робочий процес жатки. Під час руху комбайна приводяться в дію мотовило 4 (рис. 6.6), різальний апарат 7 і транспортер 8. Подільники 6 розділяють стебла і спрямовують їх до різального апарата. Граблини 5 мотовила відокремлюють певну частину стебел по напрямку руху і підводять їх до різального апарата. Зрізані стебла граблинами мотовила спрямовуються на поперечний транспортер 8, який зміщує їх до вивантажувального вікна, через яке вони випадають на стерню у валок.
Регулювання. Висоту зрізування стебел в межах 70-220 мм регулюють переміщенням башмаків вгору або вниз. Центрують ніж різального апарата зміною довжини шатуна.
Положення мотовила за висотою регулюють гідроциліндрами, а переміщення по горизонталі - вручну - повзунами по підтримуючих планках вперед або назад, кут похилу пружинних пальців (+15°...-15°) граблин мотовила - за допомогою ексцентрикового механізму, частоту обертання мотовила в межах 24-64 об/хв варіатором, ширину валка - переміщенням щитка викидного вікна.
Тиск башмаків на ґрунт (250-300Н) забезпечується натягом блока пружин механізму зрівноважування.
Ширина захвату жатки -6м. Робоча швидкість - до 12 км/год. Продуктивність - 4,6 га/год.
Жатка валкова ЖВН-6Б-01є модифікацією жатки ЖВН-6Б і агрегатують її з енергетичним засобом КПС-5Г. Відрізняється від базової тільки системою начіпного пристрою і механізмом приводу робочих органів.
Жатки валкові ЖВ-4,9 і ЖВП-4,9причіпні, зустрічно-потокові, призначені для скошування зернових колосових і круп'яних культур у валки.
Жатка ЖВП-4,9складається з платформи, різального апарата 1 (рис. 6.7), мотовила, двох стрічкових транспортерів 3 і 6, підіймально-розвантажувального пристрою, механізму привода, ходової частини, гідравлічної сис-
Платформа шарнірно з'єднана з сницею 7 і може змінювати своє положення за допомогою підіймально-розвантажувального пристрою в поздовжньому напрямку для встановлення висоти зрізу і для переведення жатки в транспортне положення. Рама платформи зварна, приєднується до сниці 7 з лівого боку в двох точках. На центральній трубі рами і правій вертикальній є місця кріплення для ходової частини.
Різальний апарат 1 складається з пальцьового бруса, ножа і штампозварних пальців. Пальці кріпляться до бруса двома болтами через пластини тертя і регулювальні прокладки в одному випадку і планки в другому. На жатці можуть встановлюватись і двосторонні подвійні пальці типу "тандем-зрізу". Привід ножа здійснюється коромислом, з'єднаним з головкою ножа болтом.
Мотовило універсальне п'ятипланчасте ексцентрикове. Конструкція мотовила запобігає намотуванню рослинної маси в з'єднанні промінь-граблина. Пальці граблин встановлюються під певним кутом до вертикалі.
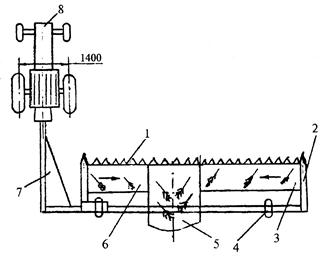
Рис. 6.7. Схема робочого процесу жатки ЖВП-4,9: 1 - різальний апарат; 2 - подільник; 3 – правий транспортер; 4 - праве колесо; 5 - викидне вікно; 6 - лівий транспортер; 7 - сниця; 8 - трактор
Транспортери лівий і правий складаються із стрічок, ведучого і веденого валів, настилів з чистиками, вітровими щитками. Приводяться в дію клиновидними пасами від шківів вала привода транспортерів.
Ходова частина - це два опорних колеса, змонтованих на окремих кронштейнах. Кронштейн лівого має форму вилки і може обертатися навколо осі на 360°. В робочому положенні фіксується штифтом. Кронштейн правого колеса може повертатися на 90°. Кут повороту обмежується упорами.
Підіймально-розвантажувальний пристрій складається з телескопічного упору і підіймального пристрою, що має гідроциліндр і гвинтовий механізм регулювання мінімальної висоти зрізу.
Робочий процес. Під час руху агрегату у полі подільники 2 спрямовують стебла в зону різального апарата 1. Мотовило підводить порції стебел до різального апарата, підтримує в момент зрізу і укладає їх на транспортери 3 і 6, які переміщують стебла в центральну частину до вивантажувального вікна 5 і укладають на стерню.
Регулювання. Висоту зрізу (80...350 мм) встановлюють гідроциліндром, а мінімальну висоту зрізу регулюють обертанням дистанційної втулки на упорі. Положення мотовила по висоті встановлюють гідроциліндрами. Винос мотовила здійснюють вручну, залежно від стану хлібостою. Частоту обертання мотовила (37...61 об/хв) регулюють переміщенням ланцюга по зірочках (2=15 і 2=18). Кут похилу пальців граблин мотовила змінюють переміщенням дисків з роликами механізму ексцентрика по пазах секторів вручну. При цьому відстань між пальцями граблин і різальним апаратом повинна бути не менше 25 мм. Ширина захвату жатки - 4,9 м. Робоча швидкість - до 10 км/год. Продуктивність - до 4 га/год.
Жатку валкову причіпну ЖВП-6А використовують, в основному, для збирання зернових культур. На ній встановлене універсальне ексцентрикове п'ятипланчасте безшпренгельне мотовило. Різальний апарат нормального зрізу. Апарат укомплектований сталевими кованими пальцями. Жатка має два полотняно-планчастих транспортери, які рухаються назустріч один одному. Платформа жатки встановлена на два опорних пневматичних колеса. У передій лівій частині жатки встановлений причіпний пристрій. Різальний апарат, транспортери і мотовило приводяться в рух від ВВП трактора. Агрегатують жатку з тракторами класу 1,4.
Жатки валкові ЖВП-6Д, ЖВП-6,4, ЖВП-7,6 і ЖВП-9,1 причіпні, широкозахватні. Ширина їх захвату відповідно 6,1; 6,4; 7,6 і 9,1 м. Вони призначені для скошування у валки зернових культур середньої і малої урожайності. Жатки обладнані пасово-планчастими транспортерами, різальним апаратом з більш високою швидкістю руху ножа, стабілізатором стійкості ходу, пристроєм швидкого переведення їх в робоче або транспортне положення.
На жатках ЖВП-6,1, ЖВП-6,4 і ЖВП-7,6 встановлене ексцентрикове мотовило, а на ЖВП-9,1 - радіально-планчасте. Агрегатують жатки з тракторами класу 1,4.
Жатка широкозахватна реверсивна ЖВР-10А призначена для скошування зернових культур і укладання зрізаних стебел у валки.
Складається з різального апарата 1 (рис. 6.8), мотовила, двох пасово-планчастих транспортерів 2 і 4, платформи, начіпного пристрою, механізму привода робочих органів і транспортерів та гідросистеми.
Мотовило жатки (основної секції і крила) ексцентрикове, п'ятипланчасте, двосекційне.
Різальний апарат 1 сегментно-пальцьового типу. На ньому встановлені стальні одинарні пальці.
Пасово-планчасті транспортери 2 і 4 встановлені на рамках, які можуть переміщуватися вліво або вправо відносно корпуса жатки. Для скошування високоврожайних хлібів транспортери зміщують у лівий та правий бік, створюючи між ними викидне вікно, куди подаються зрізані стебла з обох транспортерів.
При скошуванні низькорослих та зріджених хлібів рамку меншого транспортера 4 з'єднують із рамкою основного транспортера 2 і зміщують їх при першому проході в один бік (рис. 6.8,11), а при другому - в протилежний (рис. 6.8,111). Викидне вікно розміщується почергово: то з правого боку, то з лівого. Така схема робочого процесу жатки дає можливість за два проходи формувати здвоєний валок із шириною смуги 20 м. Механізм привода жатки розміщений у центральний частині. Він приводиться в рух від реверс-редуктора через ланцюгові передачі і клинопасовий варіатор. Жатка переводиться з робочого в транспортне положення за допомогою трьох гідроциліндрів.
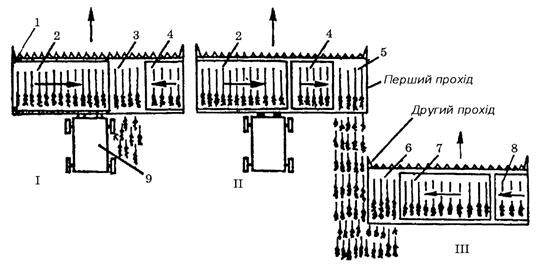
Рис. 6.8. Схема робочого процесу реверсивної широкозахватної жатки: І, II, III - проходи агрегата; 1 - різальний апарат; 2, 4, 7 і 8 - транспортери; 3, 5 і 6 - викидні вікна;9 - енергетичний засіб
Керування положенням і частотою обертання мотовила, а також переміщенням транспортерів забезпечується гідросистемою жатки.
Корпус жатки двосекційний, секції з'єднані між собою шарнірно. На секціях встановлені важільно-пружинні механізми зрівноважування. Основна секція має опорні башмаки, а додаткова - опорне колесо. Башмаки, опорне колесо і механізм зрівноважування жатки забезпечують копіювання рельєфу поля у поздовжньому і поперечному напрямках.
Висоту зрізування регулюють переміщенням вгору або вниз опорних башмаків і колеса жатки, частоту обертання мотовила в межах 20-50 об/хв - гідрофікованим варіатором механізму привода, положення мотовила за висотою - гідроциліндрами. Винос мотовила, переміщення його вперед або назад по підтримувальних планках виконують вручну. Кут похилу пальців граблин мотовила регулюють важелем ексцентрикового механізму.
Жатку агрегатують із зернозбиральними комбайнами СК-5М "Нива", "Єнісей-1200". Ширина захвату жатки - 10 м, робоча швидкість - до 8 км/год, мінімальна висота зрізу - 10 см, продуктивність жатки - до 7 га/год.
Жатка зернова широкозахватна ЖВР-10-ОЗА є модифікацією жатки ЖВР-10А (робочі органи і транспортери уніфіковані). Мотовило жатки безшпренгельне, суцільнозварне, приводиться в рух від гідропривода. Жатка має меншу металомісткість і значно підвищений строк служби.
Робочий процес жатки та варіант використання такий самий, як і жатки ЖВР-10А. Може використовуватись для прокошування зернових культур з укладанням валка через середнє викидне вікно. Агрегатують її з енергетичним засобом КПС-5Г, Д-101А та ін.
Ширина захвату - 10 м, робоча швидкість - до 8 км/год, ширина викидного вікна - 1273-1425 мм, продуктивність - до 6-7 га/год.
Немає коментарів:
Дописати коментар